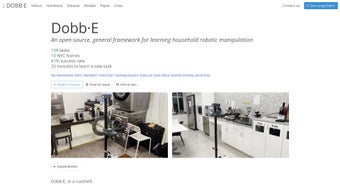
Dobb-E: Insegnare ai robot compiti domestici
Dobb-E è un framework open-source innovativo progettato per insegnare ai robot a svolgere compiti domestici attraverso l'imitazione. Utilizzando un dispositivo chiamato Stick, composto da un bastone per raggiungere oggetti, parti stampate in 3D e un iPhone, Dobb-E raccoglie dati da un dataset chiamato Homes of New York che include 13 ore di interazioni in 22 abitazioni. Questo approccio economico e ergonomico facilita la raccolta di dimostrazioni necessarie per l'apprendimento dei robot.
Il framework utilizza un modello di apprendimento delle rappresentazioni, Home Pretrained Representations (HPR), basato sull'architettura ResNet-34. Dobb-E ha dimostrato un'ottima capacità di adattamento, raggiungendo un tasso di successo medio dell'81% nel risolvere compiti nuovi in soli 15 minuti, utilizzando solo cinque minuti di dati raccolti in un nuovo ambiente. Inoltre, il progetto offre accesso a modelli pre-addestrati, codice e documentazione su GitHub.